What is CVXPY?¶
CVXPY is a Python-embedded modeling language for convex optimization problems. It automatically transforms the problem into standard form, calls a solver, and unpacks the results.
The code below solves a simple optimization problem in CVXPY:
import cvxpy as cp
# Create two scalar optimization variables.
x = cp.Variable()
y = cp.Variable()
# Create two constraints.
constraints = [x + y == 1,
x - y >= 1]
# Form objective.
obj = cp.Minimize((x - y)**2)
# Form and solve problem.
prob = cp.Problem(obj, constraints)
prob.solve() # Returns the optimal value.
print("status:", prob.status)
print("optimal value", prob.value)
print("optimal var", x.value, y.value)
status: optimal
optimal value 0.999999999761
optimal var 1.00000000001 -1.19961841702e-11
The status, which was assigned a value “optimal” by the solve method, tells us the problem was solved successfully. The optimal value (basically 1 here) is the minimum value of the objective over all choices of variables that satisfy the constraints. The last thing printed gives values of x and y (basically 1 and 0 respectively) that achieve the optimal objective.
prob.solve() returns the optimal value and updates prob.status,
prob.value, and the value field of all the variables in the
problem.
Changing the problem¶
Problems are immutable, meaning they
cannot be changed after they are created. To change the objective or
constraints, create a new problem.
# Replace the objective.
prob2 = cp.Problem(cp.Maximize(x + y), prob.constraints)
print("optimal value", prob2.solve())
# Replace the constraint (x + y == 1).
constraints = [x + y <= 3] + prob2.constraints[1:]
prob3 = cp.Problem(prob2.objective, constraints)
print("optimal value", prob3.solve())
optimal value 1.0
optimal value 3.00000000006
Infeasible and unbounded problems¶
If a problem is infeasible or unbounded, the status field will be set to “infeasible” or “unbounded”, respectively. The value fields of the problem variables are not updated.
import cvxpy as cp
x = cp.Variable()
# An infeasible problem.
prob = cp.Problem(cp.Minimize(x), [x >= 1, x <= 0])
prob.solve()
print("status:", prob.status)
print("optimal value", prob.value)
# An unbounded problem.
prob = cp.Problem(cp.Minimize(x))
prob.solve()
print("status:", prob.status)
print("optimal value", prob.value)
status: infeasible
optimal value inf
status: unbounded
optimal value -inf
Notice that for a minimization problem the optimal value is inf if
infeasible and -inf if unbounded. For maximization problems the
opposite is true.
Other problem statuses¶
If the solver called by CVXPY solves the problem but to a lower accuracy than desired, the problem status indicates the lower accuracy achieved. The statuses indicating lower accuracy are
“optimal_inaccurate”
“unbounded_inaccurate”
“infeasible_inaccurate”
The problem variables are updated as usual for the type of solution found (i.e., optimal, unbounded, or infeasible).
If the solver completely fails to solve the problem, CVXPY throws a SolverError exception.
If this happens you should try using other solvers. See
the discussion of Solvers for details.
CVXPY provides the following constants as aliases for the different status strings:
OPTIMALINFEASIBLEUNBOUNDEDOPTIMAL_INACCURATEINFEASIBLE_INACCURATEUNBOUNDED_INACCURATEINFEASIBLE_OR_UNBOUNDED
To test if a problem was solved successfully, you would use
prob.status == OPTIMAL
The status INFEASIBLE_OR_UNBOUNDED is rare. It’s used when a solver was able to
determine that the problem was either infeasible or unbounded, but could not tell which.
You can determine the precise status by re-solving the problem where you
set the objective function to a constant (e.g., objective = cp.Minimize(0)).
If the new problem is solved with status code INFEASIBLE_OR_UNBOUNDED then the
original problem was infeasible. If the new problem is solved with status OPTIMAL
then the original problem was unbounded.
Vectors and matrices¶
Variables can be scalars,
vectors, or matrices, meaning they are 0, 1, or 2 dimensional.
# A scalar variable.
a = cp.Variable()
# Vector variable with shape (5,).
x = cp.Variable(5)
# Column vector variable with shape (5, 1).
x = cp.Variable((5, 1))
# Matrix variable with shape (4, 7).
A = cp.Variable((4, 7))
You can use your numeric library of choice to construct matrix and
vector constants. For instance, if x is a CVXPY Variable in the
expression A @ x + b, A and b could be Numpy ndarrays, SciPy
sparse matrices, etc. A and b could even be different types.
Currently the following types may be used as constants:
NumPy ndarrays
SciPy sparse matrices
Here’s an example of a CVXPY problem with vectors and matrices:
# Solves a bounded least-squares problem.
import cvxpy as cp
import numpy as np
# Problem data.
m = 10
n = 5
numpy.random.seed(1)
A = np.random.randn(m, n)
b = np.random.randn(m)
# Construct the problem.
x = cp.Variable(n)
objective = cp.Minimize(cp.sum_squares(A @ x - b))
constraints = [0 <= x, x <= 1]
prob = cp.Problem(objective, constraints)
print("Optimal objective value", prob.solve())
print("Optimal variable value")
print(x.value) # A numpy ndarray.
Optimal objective value 4.14133859146
Optimal variable value
[ -5.11480673e-21 6.30625742e-21 1.34643668e-01 1.24976681e-01
-4.79039542e-21]
Constraints¶
As shown in the example code, you can use ==, <=, and >= to construct constraints in CVXPY. Equality and inequality constraints are elementwise, whether they involve scalars, vectors, or matrices. For example, together the constraints 0 <= x and x <= 1 mean that every entry of x is between 0 and 1.
If you want matrix inequalities that represent semi-definite cone constraints, see Semidefinite matrices. The section explains how to express a semi-definite cone inequality.
You cannot construct inequalities with < and >. Strict inequalities don’t make sense in a real world setting. Also, you cannot chain constraints together, e.g., 0 <= x <= 1 or x == y == 2. The Python interpreter treats chained constraints in such a way that CVXPY cannot capture them. CVXPY will raise an exception if you write a chained constraint.
Parameters¶
Parameters are symbolic
representations of constants. The purpose of parameters is to change the value
of a constant in a problem without reconstructing the entire problem. In many
cases, solving a parametrized program multiple times can be
substantially faster than repeatedly solving a new problem: after reading
this section, be sure to read the tutorial on Disciplined Parametrized Programming (DPP).
When you create a parameter you have the option of specifying attributes such as the sign of the parameter’s entries, whether the parameter is symmetric, etc. These attributes are used in Disciplined Convex Programming and are unknown unless specified. Parameters can be assigned a constant value any time after they are created. The constant value must have the same dimensions and attributes as those specified when the parameter was created.
# Positive scalar parameter.
m = cp.Parameter(nonneg=True)
# Column vector parameter with unknown sign (by default).
c = cp.Parameter(5)
# Matrix parameter with negative entries.
G = cp.Parameter((4, 7), nonpos=True)
# Assigns a constant value to G.
G.value = -np.ones((4, 7))
You can initialize a parameter with a value. The following code segments are equivalent:
# Create parameter, then assign value.
rho = cp.Parameter(nonneg=True)
rho.value = 2
# Initialize parameter with a value.
rho = cp.Parameter(nonneg=True, value=2)
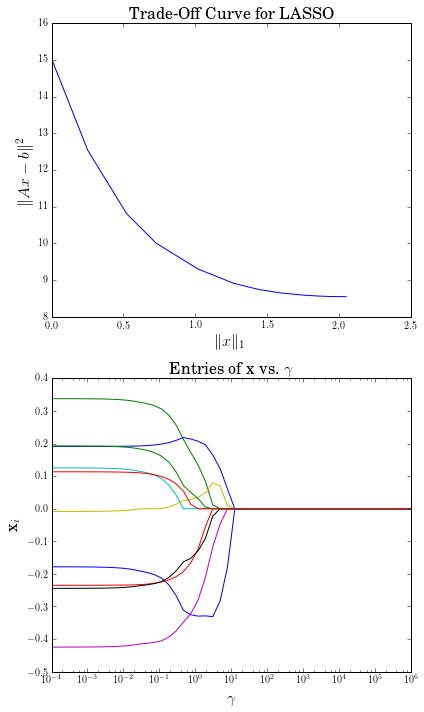
Computing trade-off curves is a common use of parameters. The example below computes a trade-off curve for a LASSO problem.
import cvxpy as cp
import numpy as np
import matplotlib.pyplot as plt
# Problem data.
n = 15
m = 10
np.random.seed(1)
A = np.random.randn(n, m)
b = np.random.randn(n)
# gamma must be nonnegative due to DCP rules.
gamma = cp.Parameter(nonneg=True)
# Construct the problem.
x = cp.Variable(m)
error = cp.sum_squares(A @ x - b)
obj = cp.Minimize(error + gamma*cp.norm(x, 1))
prob = cp.Problem(obj)
# Construct a trade-off curve of ||Ax-b||^2 vs. ||x||_1
sq_penalty = []
l1_penalty = []
x_values = []
gamma_vals = np.logspace(-4, 6)
for val in gamma_vals:
gamma.value = val
prob.solve()
# Use expr.value to get the numerical value of
# an expression in the problem.
sq_penalty.append(error.value)
l1_penalty.append(cp.norm(x, 1).value)
x_values.append(x.value)
plt.rc('text', usetex=True)
plt.rc('font', family='serif')
plt.figure(figsize=(6,10))
# Plot trade-off curve.
plt.subplot(211)
plt.plot(l1_penalty, sq_penalty)
plt.xlabel(r'\|x\|_1', fontsize=16)
plt.ylabel(r'\|Ax-b\|^2', fontsize=16)
plt.title('Trade-Off Curve for LASSO', fontsize=16)
# Plot entries of x vs. gamma.
plt.subplot(212)
for i in range(m):
plt.plot(gamma_vals, [xi[i] for xi in x_values])
plt.xlabel(r'\gamma', fontsize=16)
plt.ylabel(r'x_{i}', fontsize=16)
plt.xscale('log')
plt.title(r'\text{Entries of x vs. }\gamma', fontsize=16)
plt.tight_layout()
plt.show()
Trade-off curves can easily be computed in parallel. The code below computes in parallel the optimal x for each \(\gamma\) in the LASSO problem above.
from multiprocessing import Pool
# Assign a value to gamma and find the optimal x.
def get_x(gamma_value):
gamma.value = gamma_value
result = prob.solve()
return x.value
# Parallel computation (set to 1 process here).
pool = Pool(processes = 1)
x_values = pool.map(get_x, gamma_vals)
Custom Labels¶
You can assign custom labels to expressions and constraints to make
debugging and model interpretation easier. Labels appear when printing
constraints and can be used with the format_labeled() method to
show labeled expressions in problems.
Labels can be assigned using the set_label() method or the label property:
import cvxpy as cp
import numpy as np
# Create variables
weights = cp.Variable(3, name="weights")
# Create constraints with custom labels
constraints = [
(weights >= 0).set_label("non_negative_weights"),
(cp.sum(weights) == 1).set_label("budget_constraint"),
(weights <= 0.4).set_label("concentration_limits")
]
# Create expressions with custom labels (portfolio example)
# Expected returns and covariance (toy data for illustration)
mu = np.array([0.08, 0.10, 0.07])
Sigma = np.array([[0.10, 0.02, 0.01],
[0.02, 0.08, 0.03],
[0.01, 0.03, 0.09]])
expected_return = (mu @ weights).set_label("expected_return")
risk = cp.quad_form(weights, Sigma).set_label("risk")
# Build objective (risk-return tradeoff)
objective = cp.Minimize(risk - 0.5 * expected_return)
# Create and display the problem
problem = cp.Problem(objective, constraints)
# Use format_labeled() to see labels in the objective
print(problem.format_labeled())
minimize risk + -0.5 @ expected_return
subject to non_negative_weights: 0.0 <= weights
budget_constraint: Sum(weights, None, False) == 1.0
concentration_limits: weights <= 0.4
The set_label() method returns the object itself, allowing method chaining.
Labels are “live” and can be modified after problem creation:
# Change labels dynamically
risk.label = "portfolio_risk" # Change label
print(problem.format_labeled())
minimize portfolio_risk + -0.5 @ expected_return
subject to non_negative_weights: 0.0 <= weights
budget_constraint: Sum(weights, None, False) == 1.0
concentration_limits: weights <= 0.4
For more details on the label feature, including advanced usage and limitations, see the full labels documentation.
Next steps¶
For more features and examples, explore the rest of the CVXPY documentation.